(Credit goes to Brandon Garman for the graphic above. It’s part of a very nice sUAS graphic he’s putting together at the moment.)
Following up on the earlier post on the addition of orthophotos and textured mesh to OpenDroneMap (FYI, one word, and not OpenDroneMaps) https://smathermather.wordpress.com/2014/12/22/opendronemap-orthophotos-and-textured-mesh/ we have some more features in the pipeline. This is a deeper dive into architecture and future enhancements.
In the previous post, I talked about the addition of orthophotos and textured surface models as outputs. Those are currently being refined by the folks at Spotscale. In addition to that work, Spotscale is also adding the ability to include ground control points in the processing chain.
This will allow for the following:
- imagery that doesn’t have onboard GPS to be used
- refinement for datasets that do have onboard GPS, but have more accurate ground control points
- use of ODM with balloons
- kite aerial photography and other applications.
I am really excited by these enhancements. They lower the barrier to entry for a range of users, widen the use cases, and allow for fine refinements of the geometry / geography of ODM outputs.
The other thing in progress is the integration of Mapillary’s OpenSfM into the toolchain. This gets us a few things:
- A modern SfM solution as an option at the front of the toolchain. The hope is this will improve the performance and quality of image matching. It will also allow us to take advantage of the solutions that Mapillary has developed and is developing for dealing with photo matching at scale and with a range of camera qualities, types, etc.
- The ability to more easily use ground level imagery in the toolchain
- Auto-correction of GPS ephemeris in the imagery using best available GPS ephemeris and structure from motion positioning (ala http://blog.mapillary.com/update/2014/11/14/opensfm.html)
This is huge. I expect between the work of Spotscale and Mapillary that, image smoothing / vignetting fixes aside, ODM will be on-par with any sUAS image processing software. Delivery and testing will tell, but stay tuned.
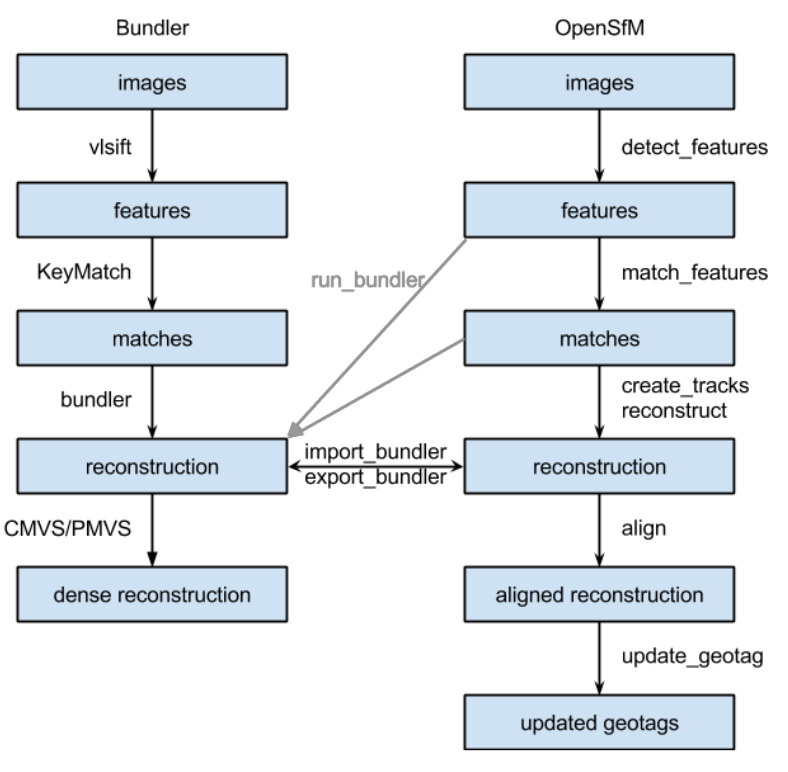
An initial schematic for how the OpenSfM and ODM can integrate now is below. In short order, OpenSfM will run as a submodule within OpenDroneMap, and we likely keep Bundler / vlsift for legacy sake. When this happens, the schematic will simplify somewhat.