
I think of data from photogrammetry as a pipeline problem in which we have just begun to address the beginning of the pipeline. Historically, photogrammetry was the purview of a few (and depending on where you are in the world, laws may make it still so), dependent upon expensive software, even more expensive hardware (think: calibrated camera >$400k, cesna ~$130k, IMU ~$25k, plus fuel etc. yipe!). Now these platforms are still useful: they scale well, they perform well, they are well understood, and they fit within existing national airspace expectations without hindrance.
With the advent of drones, free and open source software for processing imagery, and massive projects taking advantage of these, we see the opportunity for changing the resolution, cadence, responsiveness, completeness, and flexibility of imagery collection.

And thus enters the pipeline:
data collection –> data processing –> information retrieval
With OpenDroneMap, we have spend a lot of time in the middle of this pipeline, with lots of thoughts and advice for improving the left of the pipeline, and very little attention to the information retrieval portion.
Piero Toffanin, founder of WebODM, CloudODM, NodeODM, PyODM, un… we’ll we’ll just say co-founder of the OpenDroneMap ecoystem, has been working on this with posts about AI detection of cars and monitoring the state of the art with respect to the fusion of deep learning and photogrammetry, so expect rich project additions with time.
Lately, I have been thinking about what we can do with existing tools to map forests. The Forest Tools project in R is promising for this, so I thought I would apply it to a dataset processed in OpenDroneMap:
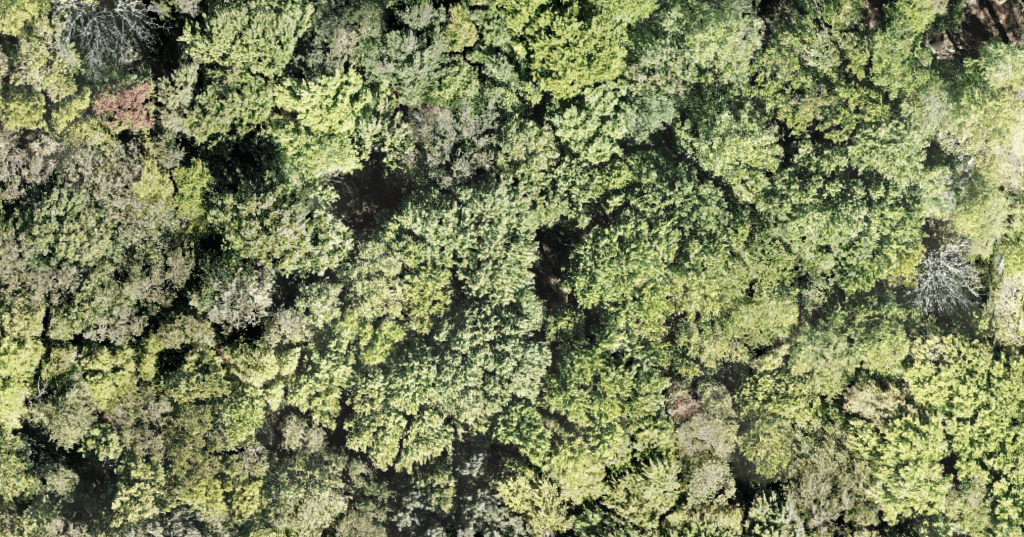
Getting good data over forests can be a challenge: the structure of trees is complicated, structure from motion approaches struggle with finding adequate features, and so flying with plenty of overlap is necessary.
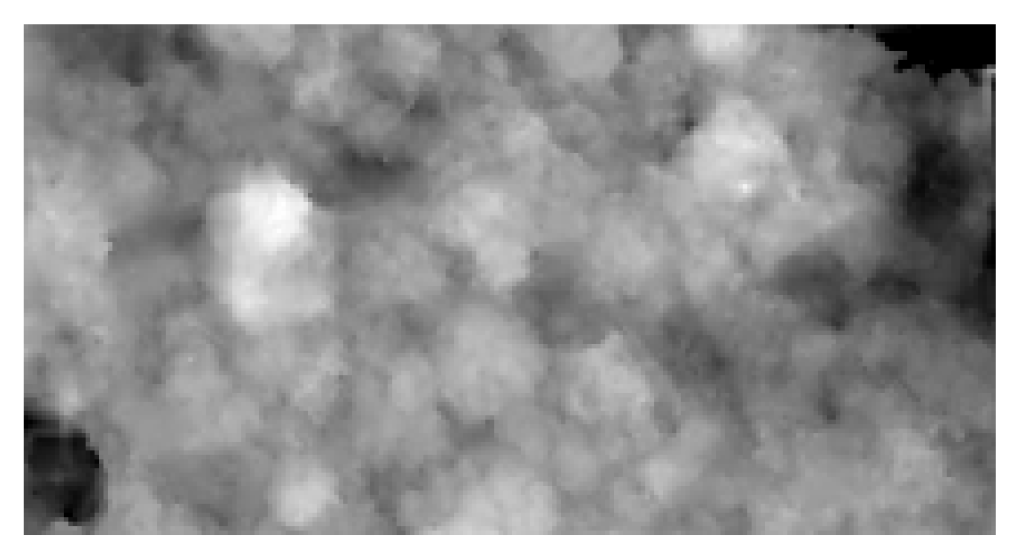
For this dataset, we did OK, though we have since discovered some better approached. Nonetheless, the orthophoto is good enough, and the digital surface model is quite good:
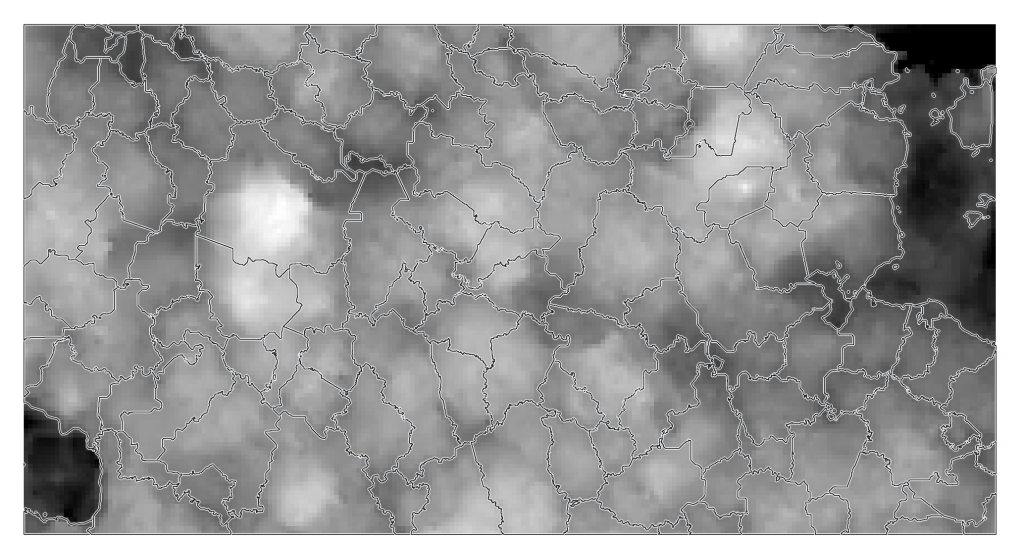
Our forest of choice here is… complicated: its a mature Beech Maple Forest in North America. The canopy is a mix of different species, age classes, sizes, and layers. So, in such a complicated context, can we delineate canopies?
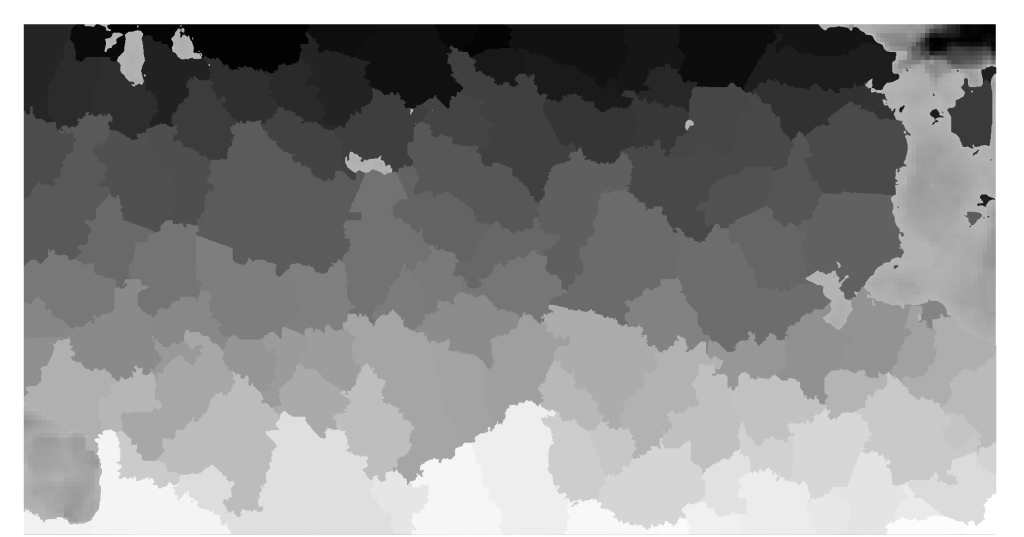
This is a result with minimal no parameterization. As such the results are promising.
Something something, drinking from a data fire hose analogy. More to come!

Very useful work you’re doing. Canopy edge discrimination (and trunk location) would be the holy grail for my native forest assessments. Would give a lot mroe time to understand the forest rather than just measuring it.
Wanted to know your thoughts on real time orthomosaicing. The benefits of real time delivery of orthoproducts are unquestionably very much desired across a plethora of industries. I’m wondering if any such feature/algorithm will be included in upcoming OpenDroneMap software products. Would love to hear from you!