
Contemplation
This is a theoretical post. Imagine for a moment that OpenDroneMap can scale to the compute resources that you have in an elastic and sane way (we are short weeks away from the first work on this), and so, if you are a typical person in the high-speed internet world, you might be thinking, “Great! Let’s throw this up on the cloud!”
But imagine for a moment you are in a network limited environment. Do you process on a local laptop? Do you port around a desktop? The folks in the humanitarian space think about this a lot — depending on the project, one could spend weeks or months in network limited environments.
Enter POSM
Folks at American Red Cross (ARC) have been thinking about this a lot. What has resulted, in order to aid in mapping e.g. rural areas in West Africa is Portable OpenStreetMap, or POSM, a tool for doing all the OpenStreetMap stuff, but totally and temporarily offline.
The software for this is critical, but I’ve been increasingly interested in the hardware side of things. OpenDroneMap, even with it’s upcoming processing, memory, and scaling improvements will still require more compute resources than, say OpenMapKit and Field Papers. I’ve been contemplating that once the improvements are in place, what kind of compute center could you haul in the field with you?
I’m not just thinking humanitarian and development use cases either — what can we do to make processing drone imagery in the field faster? Can we make it fast enough to get results before leaving the field? Can we modify our flight planning based on the stream of data being processed and adapt while we are there? Our real costs for flying are often finding staff and weather windows that are good, and sometimes we miss opportunities in the delay between imagery capture and processing. How can we close that loop faster?
The NUC
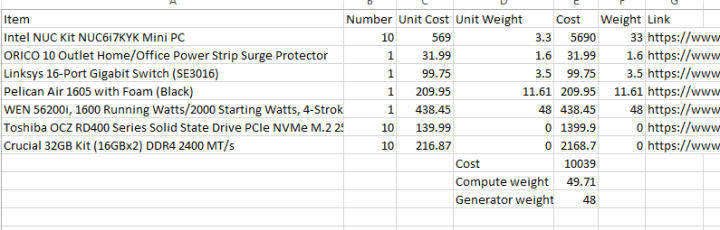
On the hardware side of the house, the folks at ARC are using Intel NUC kits. For ODM, as I understand it, they go a step up in processing power from their specs to something with an i7. So, I got to thinking — can we put together a bunch of these, running on a generator, and not break the bank on weight (keep it under 50 lbs)? It turns out, maybe we can. For a round $10,000, you might assemble 10 of these 4-core NUCs with a network switch, stuff it into a Pelican Air 1605 case, with 320 GB RAM, and 2.5 TB of storage. More storage can be added if necessary.
This is a thought experiment so far, and may not be the best way to get compute resources in the field, your mileage may vary, etc., but it’s and interesting though.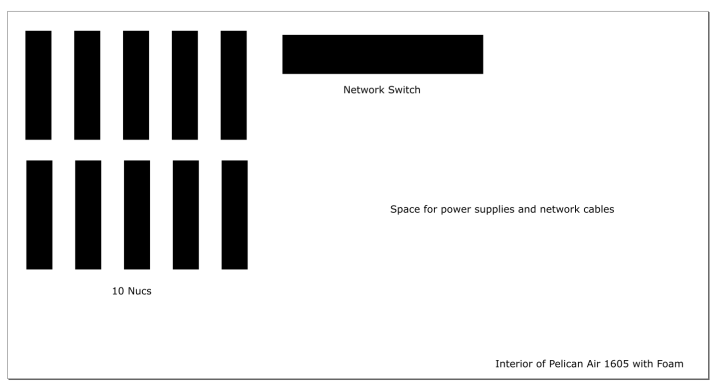
Cost Breakdown
Follow up
Any thoughts? Anyone deployed serious compute resources to the field for drone image processing? I’d love to hear what you think.

This is a great idea for rapid response/deployment to any sort of disaster area. I can imagine it being used to survey earthquake or tsunami damage. I can also imagine it being used for a variety of military applications as well.